The BugWright2 project
Autonomous Robotic Inspection and Maintenance on Ship Hulls
On-site field test on a ship
[Testing week]
Field tests!
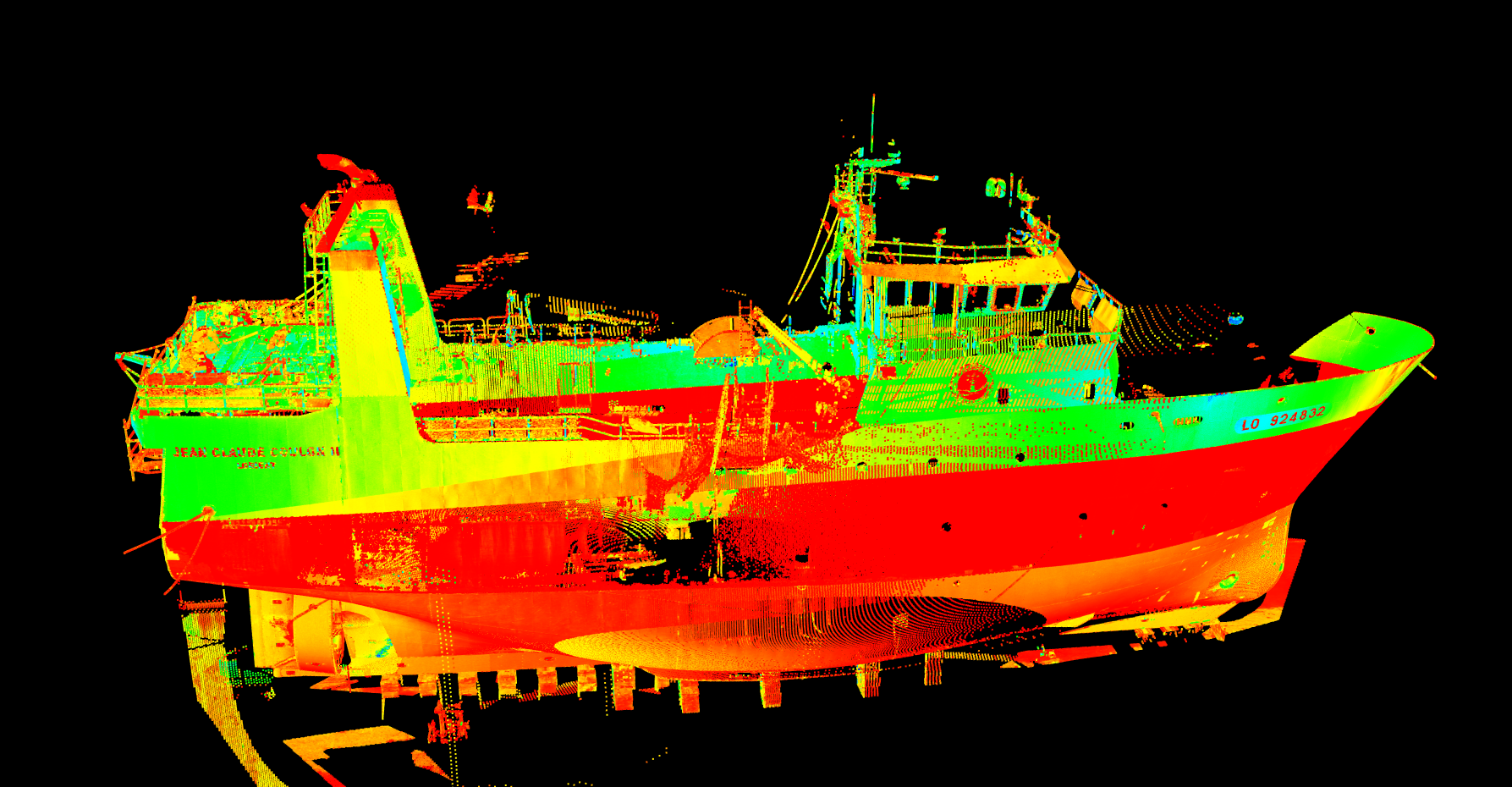
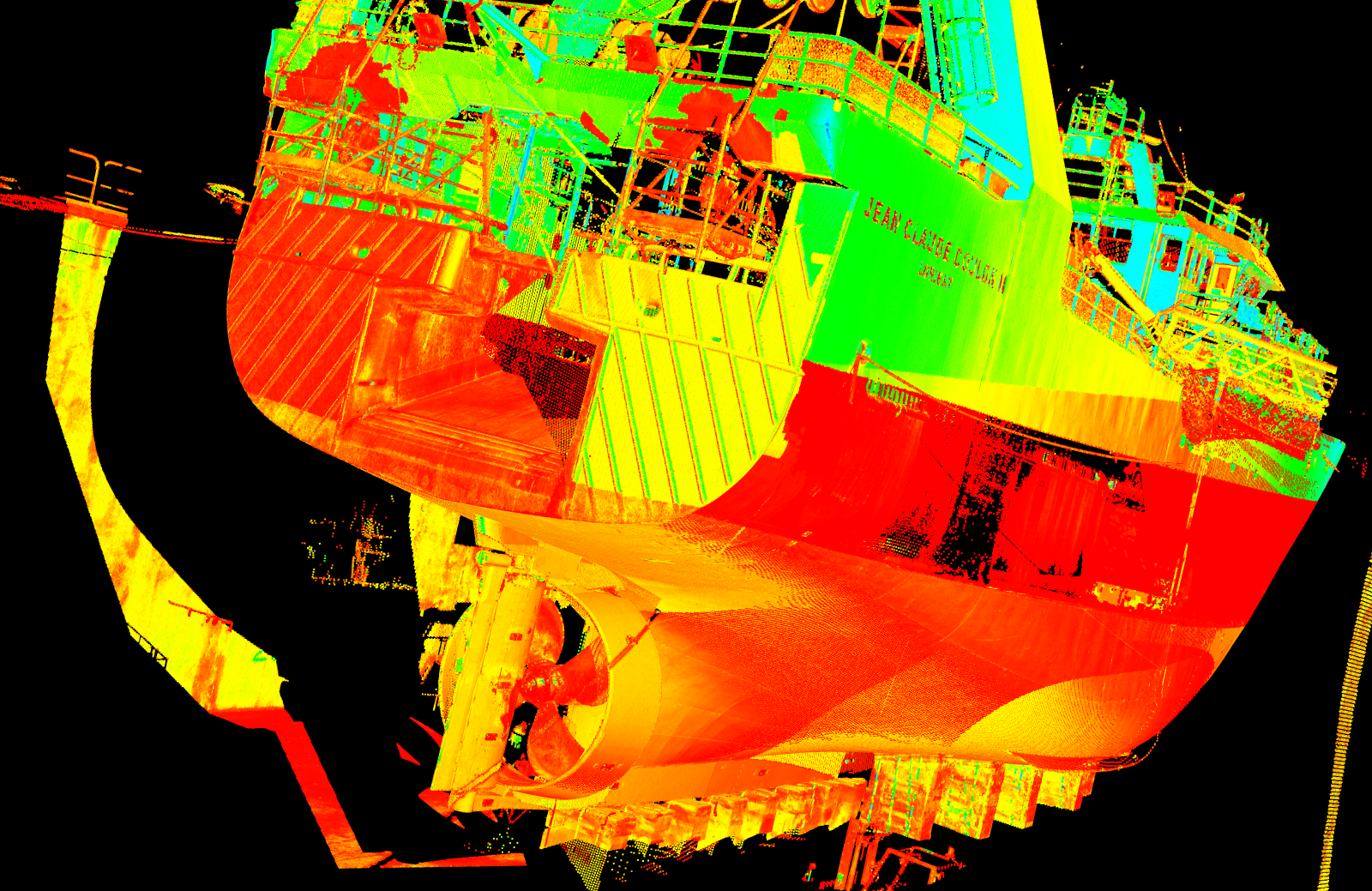
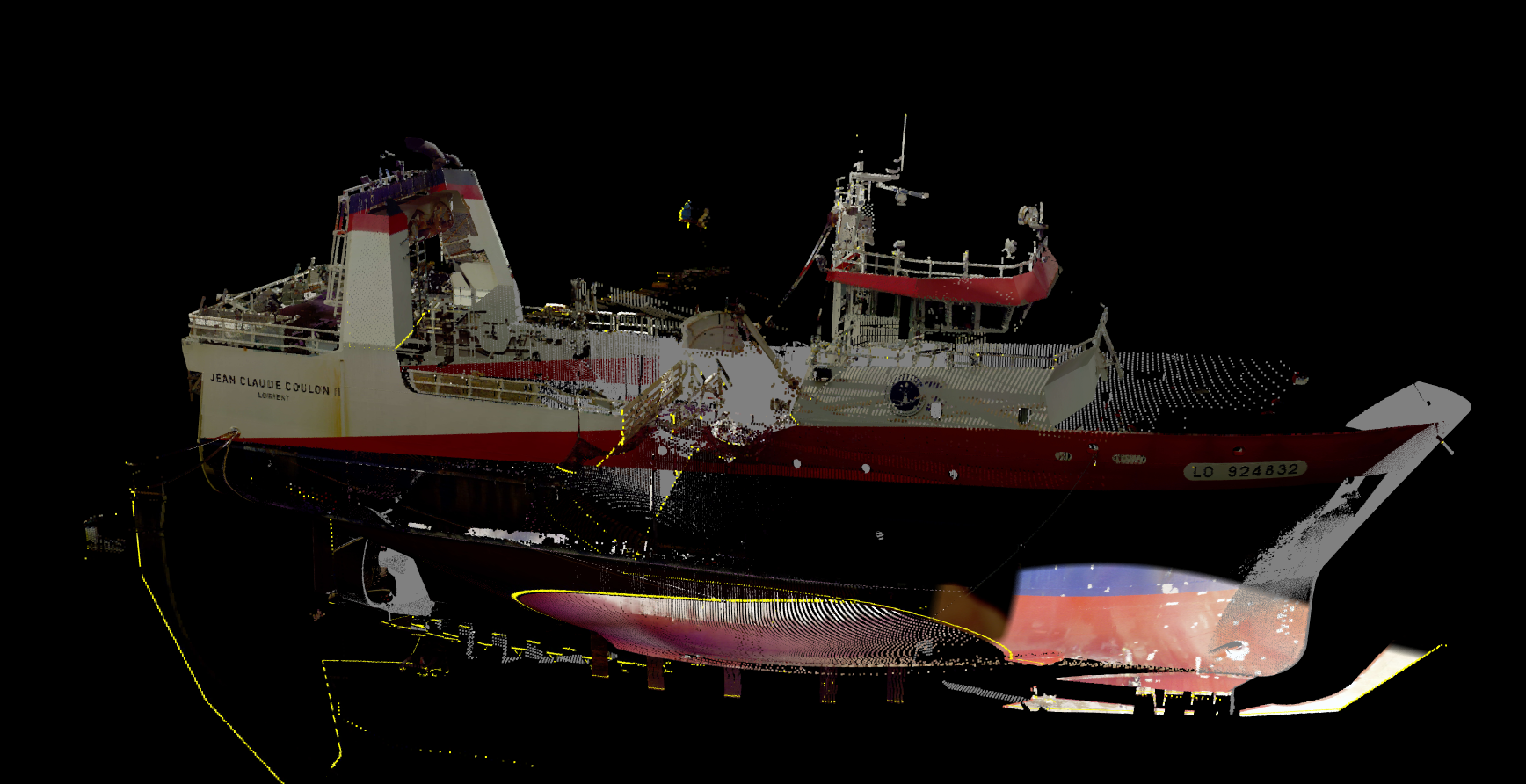
👷♀️ Last week, partners CNRS and RBP travelled to Concarneau, France, to collect the data needed to build a 3D model of a ship in dry dock.
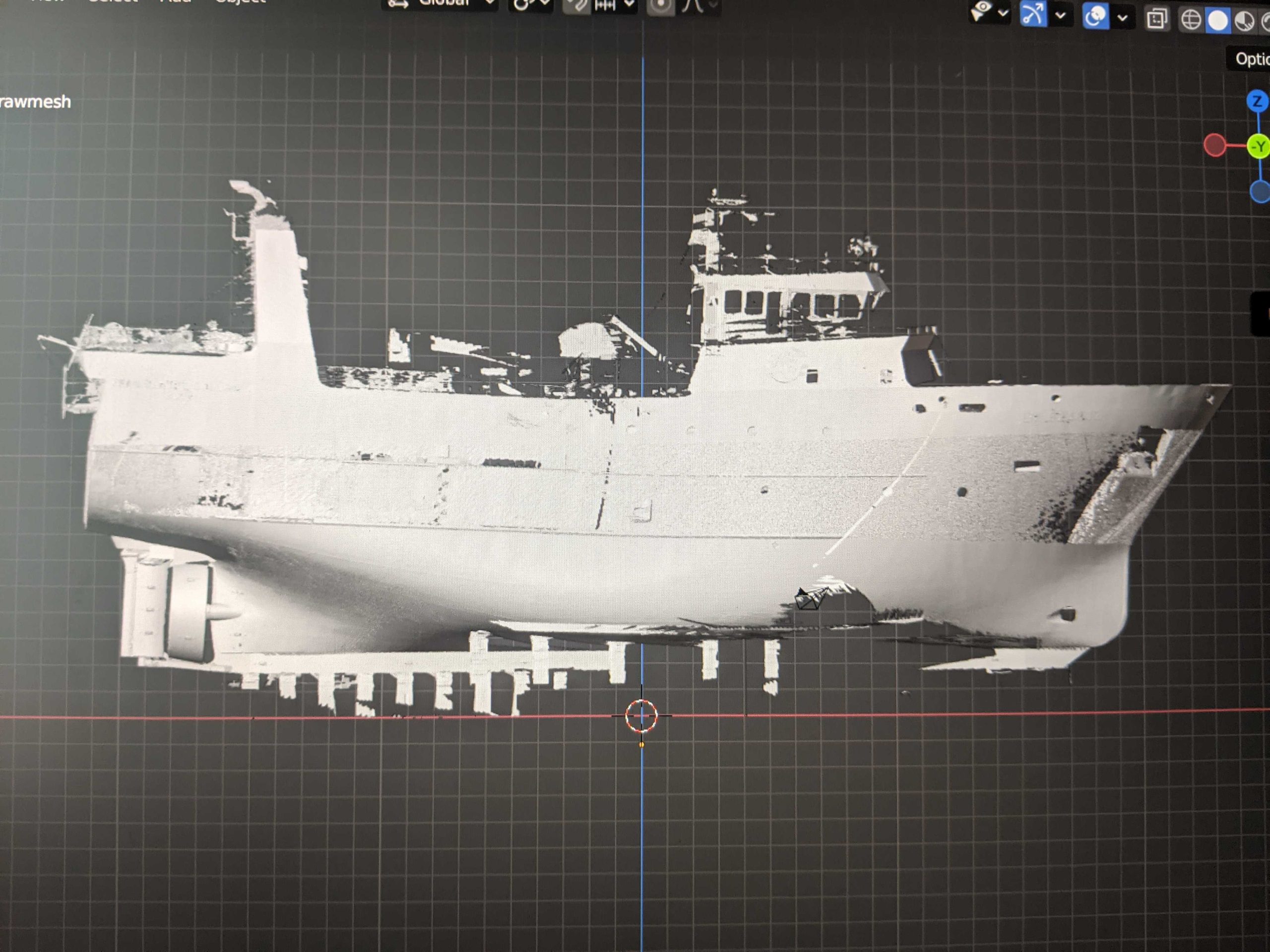
⚓ Having the ship out of the water allowed CNRS to have a clear view of the entire hull and it provided a unique opportunity to generate a 3d model of the whole ship. To create the 3D model, CNRS used its Robotic Total Station to scan the ship and create a high-precision representation in the form of a point cloud. The laser scanner was positioned in 10 different spots to capture a variety of perspectives and have a complete and detailed model of the ship.
💻 This model will be used within simulation environments to design and test the user interface and to test the robotic inspection and navigation strategies.
The environment was quite dynamic and challenging, but despite the rain, it was possible to scan the ship without disrupting the maintenance activities ☂️.
🤝 BugWright2 would like to thank Scapêche and Piriou for their welcome.
#euproject #h2020 #inspections #robotics #dronetechnology #research #fieldwork #tests #pointcloud #data #maritime